 F-TAC Hand自我調整物體抓取能力 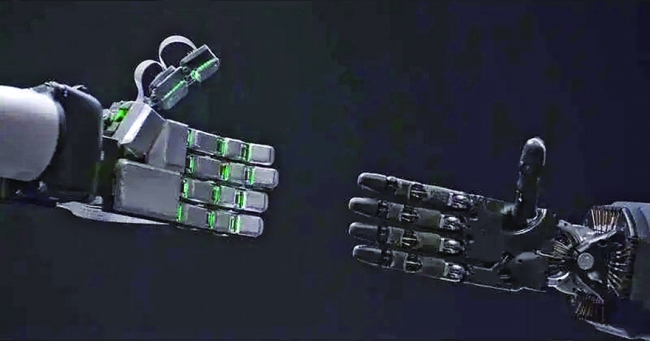 機械人仿生手F-TAC Hand示意圖 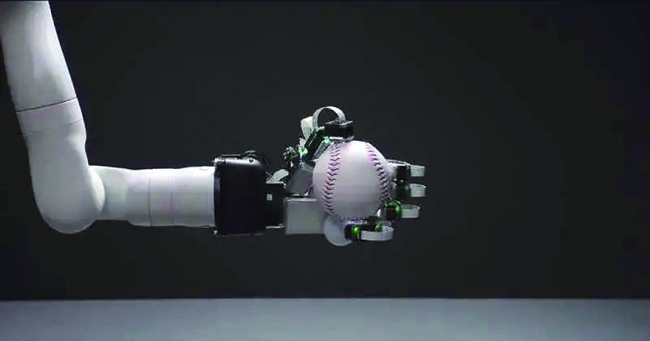 機械人仿生手F-TAC Hand抓取物體示意圖  ➡F-TAC Hand 即時高分辨觸覺 感知能力  研究團隊研製的靈巧手F-TAC Hand 與人手的抓取動作比較 華研發“超級仿生手” 當機械人拿起一個裝滿水的杯子時,它也能像人類一樣,根據重量和觸感微妙地調整手指的位置和力度——這種只在科幻電影中出現的場景,如今被中國科學家團隊變為現實。 北京大學人工智能研究院、北京大學武漢人工智能研究院、北京通用人工智能研究院、北京大學工學院和倫敦瑪麗皇后大學聯合團隊日前在《自然 · 機器智能》發佈最新科研成果——全球首款兼具全手高解析度觸覺感知與完整運動能力的機器人仿生手F-TAC Hand。這隻靈巧的手掌表面百分之七十區域覆蓋着精密的觸覺“皮膚”,空間解析度高達○點一毫米,相當於每平方厘米密佈約一萬個觸覺點,遠超當前先進的商用機械手僅指尖有單點力感的局限。 手是人體最靈活的器官之一,也是使用頻率最高的運動器官之一。人手奧秘無窮——廿七塊骨骼、卅四塊肌肉,支撐起廿四個自由度的靈活性。人類抓取物體時,觸覺回饋與運動功能缺一不可:前者感知力量、紋理、溫度;後者精確控制關節與肢體運動。然而,如何將高解析度觸覺與複雜運動能力整合到機械手上,長久以來是機械人領域的巨大瓶頸。 實驗證明,當最優抓取策略遭遇意外(如物體碰撞),F-TAC Hand能在約一百毫秒內感知危機並閃電切換方案。在嚴苛的六百次真實多物體抓取測試中,它面對執行誤差和碰撞風險,成功率從無觸覺系統的百分之五十三點五躍升至驚人的百分之一百。這種基於觸覺的閉環回饋,為機械人在家庭、醫療、工業等不確定環境中的穩定操作提供了關鍵保障。 論文第一作者、北京大學博士生趙秭杭介紹,“人類手部的靈活性和適應性很大程度上歸功於其密集的觸覺傳感能力,使我們能夠精確感知與調整抓握過程,但在機械人領域,如何在不影響運動功能的前提下實現全手觸覺覆蓋,始終是一個難題。” 論文通訊作者、北京大學人工智能研究院助理教授、北京大學武漢人工智能研究院具身智能實驗室主任朱毅鑫說,F-TAC Hand的靈感源於人類手部的生物智慧。它類比人類皮膚佈滿感測器、大腦高效處理資訊的機制,創新性地將十七個高解析度觸覺感測器以六種不同配置集成於掌中。更巧妙的是,這些感測器身兼雙職:既是敏銳的“感知神經”,也是支撐的“骨骼結構”。這種一體化設計,讓F-TAC Hand在保持靈活運動的同時,首次實現了前所未有的廣域觸覺覆蓋。 沒有豐富觸覺回饋的傳統機器手,在複雜多變的環境中往往捉襟見肘。F-TAC Hand的突破在於它像人類一樣,能即時感知接觸變化並瞬間調整策略。 論文共同第一作者、北京大學博士生李宇颺解釋道:“機械手關節的高度靈活性本身是控制難題。”團隊為此開發了基於概率模型的智能演算法,能生成極其接近人類多樣性的抓取策略,覆蓋十九種常見抓握類型。 專家表示,F-TAC Hand在需要“人手”參與的領域潛力無限。其在特定場景中展現出超越人類手部的穩定性,尤其適用於對精度要求嚴苛的輔助手術、高精密組裝、航空航天及應急回應等場景。朱毅鑫展望未來:“大型語言模型等純計算AI在處理物理交互時仍面臨挑戰。 水 登 |















請發表評論