 “Zippy身高不足四厘米 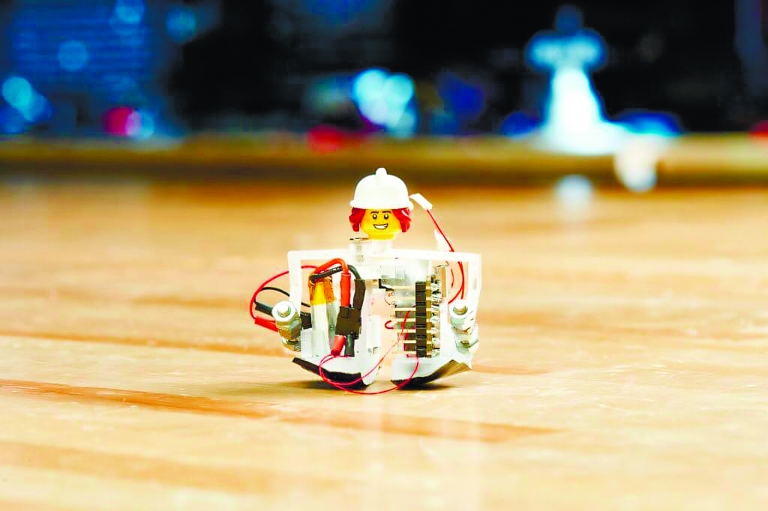 全球最小的電動自主微型雙足機械人“Zippy” 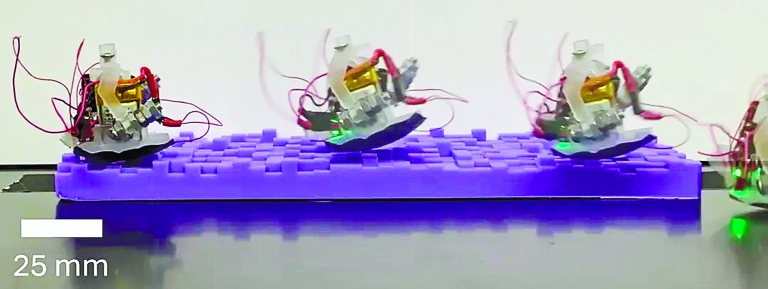 機械人成功行走隨機障礙地形 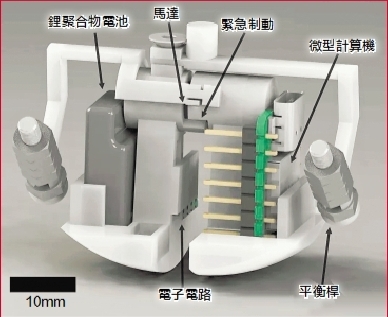 “Zippy”的結構 最小電動自主雙足機械人問世 美國卡內基梅隆大學科研團隊宣佈研製出已知全球最小的電動自主微型雙足機械人“Zippy”。這款機械人身高不足四厘米,憑藉其精巧的機載電池、執行與控制系統,不僅能自主啟動,更能以每秒十步的速度完成行走、轉彎、跳躍及攀爬等動作。 研究團隊表示,微型雙足機械人雖構造複雜卻意義重大。雙足設計使其既能適應崎嶇地形,又比輪式機械人更具機動優勢。他們通過簡化行走機制,成功實現了微型雙足機械人的實用化突破。 在小型機械人領域,動態穩定性的挑戰本就巨大,而“Zippy”成功克服了這一難題,成為獨立式小型機械人中唯一的雙足機械人。它不僅能被動站立無需驅動,還具備轉彎、跳躍和上台階等多種能力。在速度方面,“Zippy”最快前進速度可達每秒廿五厘米,相當於每秒十個腿長,這一速度使其成為相對於其腿長(或非直腿機械人的臀部高度)最快的自主雙足機械人。 “Zippy”的行走奧秘在於:前腿抬起時重心前移,配合圓弧形前足設計,為後腿留出充分的擺動空間,從而實現大幅跨步。 該研究的主要作者之一史蒂文曼將在今年的IEEE國際機械人與自動化會議上展示這項成果,他強調了微型足式機械人的複雜性及其重要意義。“它們可以進入人類甚至其他機械人無法進入的狹窄空間,”史蒂文曼表示,“Zippy可以在緊急搜救、工業檢查甚至被部署到地質學上有價值的區域進行科學研究等方面發揮作用。” 展望未來,該團隊計劃為“Zippy”添加攝像頭等感測器,使其能夠進行定位並自主在環境中導航。具備定位能力後,多個“Zippy”機械人可以協同部署,在危險環境中以群體的形式進行檢查或搜救行動。 相關成果發佈於二○二五年美國電氣電子工程師學會國際機械人與自動化會議上。 月 比 |















請發表評論